libmodbus
A featureful and portable Open Source Modbus library.
Description
libmodbus is a library to send/receive data with a device which respects the Modbus protocol. This library contains various backends to communicate over different networks (eg. serial in RTU mode or Ethernet in TCP IPv4/IPv6). The http://www.modbus.org site provides documentation about the Modbus Specifications and Implementation Guides.
libmodbus provides an abstraction of the lower communication layers and offers the same API on all supported platforms.
This documentation presents an overview of libmodbus concepts, describes how libmodbus abstracts Modbus communication with different hardware and platforms and provides a reference manual for the functions provided by the libmodbus library.
Use cases
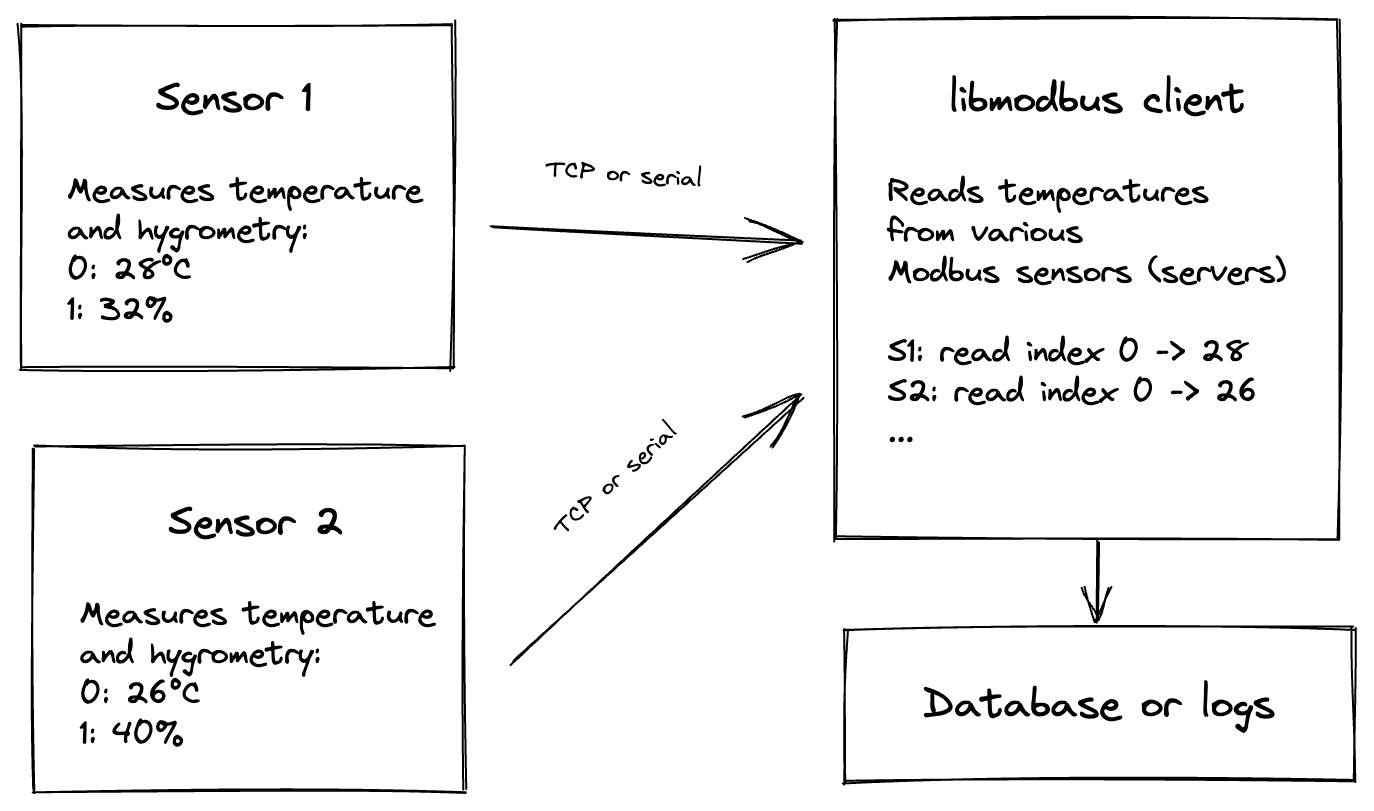
The library can be used to write a:
- client, the application reads/writes data from various devices.
- server, the application provides data to several clients.

Contexts
The Modbus protocol supports several transport protocols (eg. serial RTU, Ethernet TCP) called backends in libmodbus.
The first step is to allocate and set a modbus_t context according to the
required backend (RTU or TCP) with a dedicated function, such as
modbus_new_rtu.
The function will return an opaque structure called modbus_t containing all
necessary information to establish a connection with other Modbus devices
according to the selected backend.
Once this context has been created, you can use use the common API provided by libmodbus to read/write or set the various timeouts. With this common API, it's easy to switch the backend of your application from RTU to TCP IPv6 for example.
RTU Context
The RTU backend (Remote Terminal Unit) is used in serial communication and makes use of a compact, binary representation of the data for protocol communication. The RTU format follows the commands/data with a cyclic redundancy check checksum as an error check mechanism to ensure the reliability of data. Modbus RTU is the most common implementation available for Modbus. A Modbus RTU message must be transmitted continuously without inter-character hesitations (extract from Wikipedia, Modbus as of Mar. 13, 2011, 20:51 GMT).
The Modbus RTU framing calls a slave, a device/service which handle Modbus requests, and a master, a client which send requests. The communication is always initiated by the master.
Many Modbus devices can be connected together on the same physical link so before sending a message, you must set the slave (receiver) with modbus_set_slave. If you're running a slave, its slave number will be used to filter received messages.
The libmodbus implementation of RTU isn't time based as stated in original Modbus specification, instead all bytes are sent as fast as possible and a response or an indication is considered complete when all expected characters have been received. This implementation offers very fast communication but you must take care to set a response timeout of slaves less than response timeout of master (otherwise other slaves may ignore master requests when one of the slaves is not responding).
To create a Modbus RTU context, you should use modbus_new_rtu.
You can tweak the serial mode with the following functions:
- modbus_rtu_get_serial_mode
- modbus_rtu_set_serial_mode
- modbus_rtu_get_rts
- modbus_rtu_set_rts
- modbus_rtu_set_custom_rts
- modbus_rtu_get_rts_delay
- modbus_rtu_set_rts_delay
TCP (IPv4) Context
The TCP backend implements a Modbus variant used for communications over TCP/IPv4 networks. It does not require a checksum calculation as lower layer takes care of the same.
To create a Modbus TCP context, you should use modbus_new_tcp.
TCP PI (IPv4 and IPv6) Context
The TCP PI (Protocol Independent) backend implements a Modbus variant used for communications over TCP IPv4 and IPv6 networks. It does not require a checksum calculation as lower layer takes care of the same.
Contrary to the TCP IPv4 only backend, the TCP PI backend offers hostname resolution.
Create a Modbus TCP PI context, you should use modbus_new_tcp_pi.
Connection
The following functions are provided to establish and close a connection with Modbus devices:
- modbus_connect establishes a connection.
- modbus_close closes a connection.
- modbus_flush flushes a connection.
In RTU, you should define the slave ID of your client with modbus_set_slave.
To analyse the exchanged data, you can enable the debug mode with modbus_set_debug.
Once you have completed the communication or at the end of your program, you should free the resources with the common function, modbus_free
Reads and writes from the client
The Modbus protocol defines different data types and functions to read and write them from/to remote devices. The following functions are used by the clients to send Modbus requests:
To read data:
- modbus_read_bits
- modbus_read_input_bits
- modbus_read_registers
- modbus_read_input_registers
- modbus_report_slave_id
To write data:
To write and read data in a single operation:
To send and receive low-level requests:
To reply to an exception:
Handling requests from server
The server is waiting for request from clients and must answer when it is concerned by the request. The libmodbus offers the following functions to handle requests:
Data mapping:
Receive:
Reply:
Proxy:
Advanced functions
Timeout settings:
- modbus_get_byte_timeout
- modbus_set_byte_timeout
- modbus_get_response_timeout
- modbus_set_response_timeout
Error recovery mode:
Setter/getter of internal socket:
Information about header:
Data handling
Macros for data manipulation:
MODBUS_GET_HIGH_BYTE(data), extracts the high byte from a byteMODBUS_GET_LOW_BYTE(data), extracts the low byte from a byteMODBUS_GET_INT64_FROM_INT16(tab_int16, index), builds a signed int64 from the four first int16 starting at tab_int16[index]MODBUS_GET_INT32_FROM_INT16(tab_int16, index), builds a signed int32 from the two first int16 starting at tab_int16[index]MODBUS_GET_INT16_FROM_INT8(tab_int8, index), builds a signed int16 from the two first int8 starting at tab_int8[index]MODBUS_SET_INT16_TO_INT8(tab_int8, index, value), set an int16 value into the two first bytes starting at tab_int8[index]MODBUS_SET_INT32_TO_INT16(tab_int16, index, value), set an int32 value into the two first int16 starting at tab_int16[index]MODBUS_SET_INT64_TO_INT16(tab_int16, index, value), set an int64 value into the four first int16 starting at tab_int16[index]
The MODBUS_GET_INT*_FROM_INT* macros return signed integers: an input whose
most significant bit is set is returned as a negative value. Since 3.2.0,
MODBUS_GET_INT16_FROM_INT8() returns a proper int16_t in every context; a
value >= 0x8000 is therefore negative. Previously it could evaluate to a
positive int when the result was used outside a 16-bit assignment.
Handling of bits and bytes:
Set or get float numbers:
- modbus_get_float_abcd
- modbus_set_float_abcd
- modbus_get_float_badc
- modbus_set_float_badc
- modbus_get_float_cdab
- modbus_set_float_cdab
- modbus_get_float_dcba
- modbus_set_float_dcba
- modbus_get_float deprecated
- modbus_set_float deprecated
Error handling
The libmodbus functions handle errors using the standard conventions found on
POSIX systems. Generally, this means that upon failure a libmodbus function
shall return either a NULL value (if returning a pointer) or a negative value
(if returning an integer), and the actual error code shall be stored in the
errno variable.
This includes cases where a Modbus server returns an exception response as a result of a failed read or write operation. The following macros expand to integer error codes that correspond to Modbus exception responses:
EMBXILFUN: illegal function (0x01)EMBXILADD: illegal data address (0x02)EMBXILVAL: illegal data value (0x03)EMBXSFAIL: server device failure (0x04)EMBXACK: acknowledge (0x05)EMBXSBUSY: server device busy (0x06)EMBXNACK: negative acknowledge (0x07)EMBXMEMPAR: memory parity error (0x08)EMBXGPATH: gateway path unavailable (0x0A)EMBXGTAR: gateway target device failed to respond (0x0B)
The modbus_strerror() function is provided to translate libmodbus-specific error codes into error message strings; for details refer to modbus_strerror.
Miscellaneous
To deviate from the Modbus standard, you can enable or disable quirks with:
The _LIBMODBUS_VERSION_STRING_ constant indicates the libmodbus version the
program has been compiled against. The variables 'libmodbus_version_major',
'libmodbus_version_minor', 'libmodbus_version_micro' give the version the
program is linked against.
Copying
Free use of this software is granted under the terms of the GNU Lesser General
Public License (LGPL v2.1+). For details see the file COPYING.LESSER included
with the libmodbus distribution.